OI-DEMO Motor
Goals
Introducing Environment Installation
Introducing Openindus modules : OI-Core and OI-Stepper
Drive stepper motors
Manage limit switches
Requirements
Visual Studio Code
VSCode Openindus extension (Recommanded)
SiliconLabs USB Driver installed (CP2102N - USB<->UART)
Understanding Start coding chapter
Description
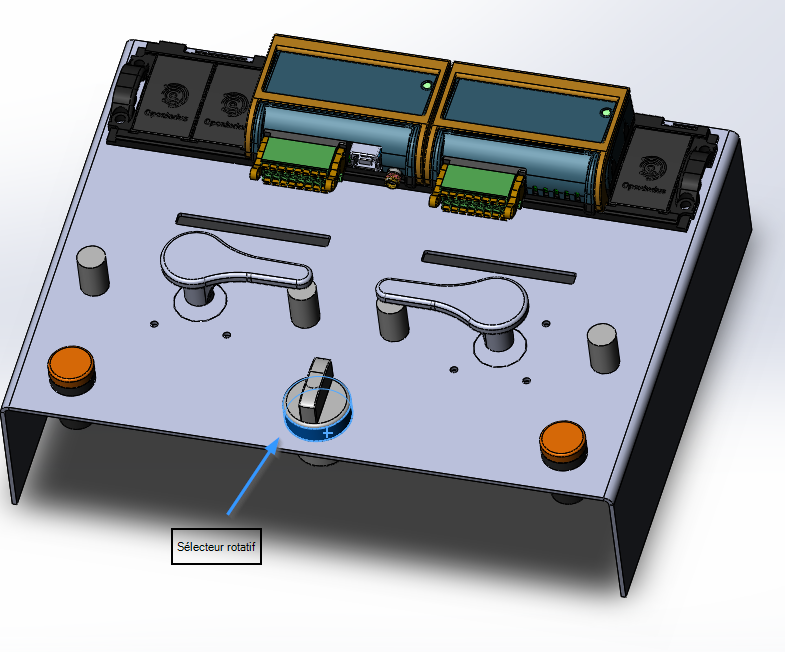
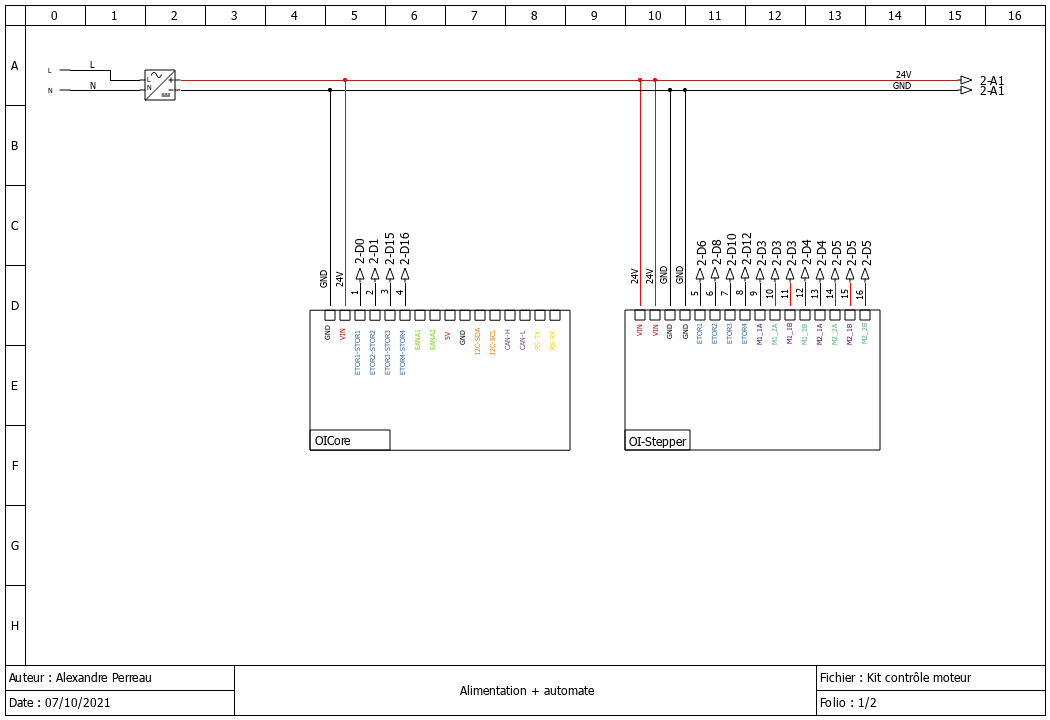
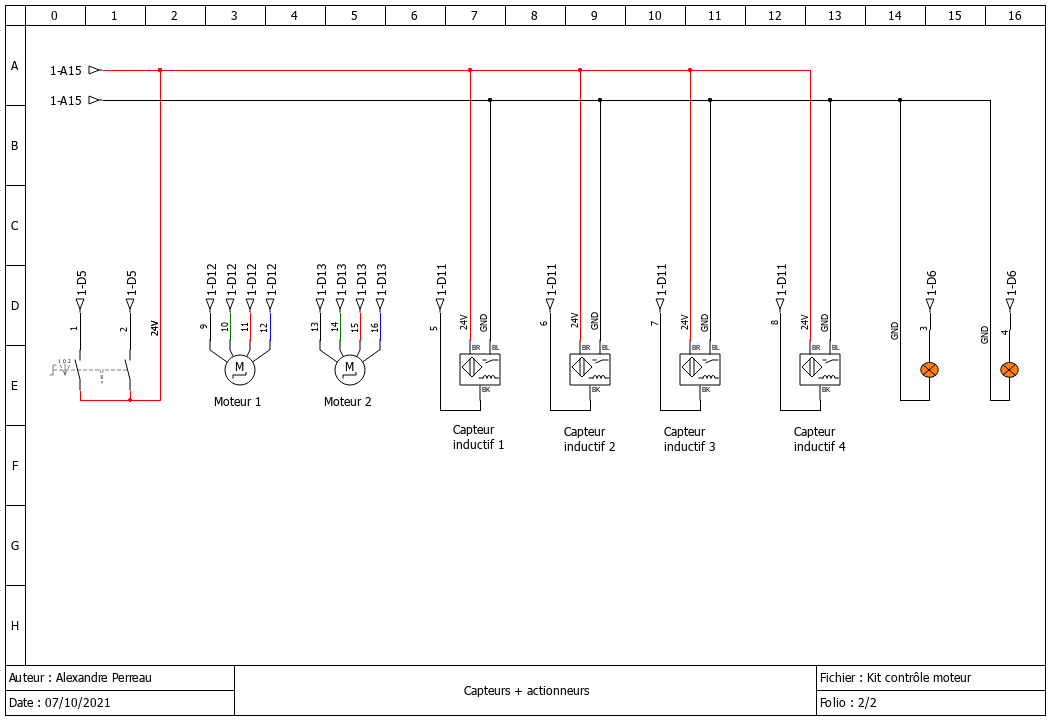
Wiring diagrams
Demo kit is wired as described below :
Source code details
OI Modules instances
// First, init the master device OICore core; // Then add slaves devices here : OIStepper stepper1;
These lines should be automatically created while using OpenIndus extension. It creates instances for each OI Module found on the OI-Rail.
Variables declaration
int mode = 0; bool switchevent = false; TaskHandle_t xHandle_LED_1 = NULL; TaskHandle_t xHandle_LED_2 = NULL; MotorDirection_t motor1_dir = FORWARD; MotorDirection_t motor2_dir = FORWARD;
TaskHandle_t variables are used to manage task : suspend, run, … MotorDirection_t variables store direction of each motor (forward or reverse)
Setup() function
This function is executed once at startup. Initialisations have to be done here.
Serial.begin(115200); Serial.println(F("Initializing..."));
Initialise serial interface (USB) at 115200 bauds. Debug message will be displayed on a terminal software configured à 115200 bauds 8-N-1 (8 bits, Parity Even, 1 stop bit).
xTaskCreate(blink_LED_1, "blink_LED_1", 2048, NULL, 1, &xHandle_LED_1); vTaskSuspend(xHandle_LED_1); xTaskCreate(blink_LED_2, "blink_LED_2", 2048, NULL, 2, &xHandle_LED_2); vTaskSuspend(xHandle_LED_2);
Creation of tasks to manage each Leds. These tasks are disable (vTaskSuspend) at startup. A Led task will be activated while a motor is rotating.
switch_mode(NULL);
Call this function to set mode to enable homing at startup working (see below).
// Reset Stepper limitswitch stepper1.detachLimitSwitch(MOTOR_1, DIN_1); stepper1.detachLimitSwitch(MOTOR_1, DIN_2); stepper1.detachLimitSwitch(MOTOR_2, DIN_3); stepper1.detachLimitSwitch(MOTOR_2, DIN_4);
Each can be attached to limit switched for safety purpose : when a limitswitch is reach, motor will automatically stops. These functions are called now, in case of a software reboot of OI-Core while OI-Stepper has been already initialize. Detaching all limit switches to enable homing.
// move motors to their initial position. // Set right sensors as limit switches for each motor Serial.println(F("Homing motors.")); stepper1.attachLimitSwitch(MOTOR_1, DIN_1, ACTIVE_HIGH); stepper1.attachLimitSwitch(MOTOR_2, DIN_3, ACTIVE_HIGH); // blink leds while motor are moving vTaskResume(xHandle_LED_1); vTaskResume(xHandle_LED_2); stepper1.homing(MOTOR_1, 20); stepper1.homing(MOTOR_2, 20); // wait for homing stepper1.wait(MOTOR_1); stepper1.wait(MOTOR_2); Serial.println(F("Motors at their 0 position.")); delay(1000);
stepper1.attachLimitSwitch() are used to attach limit switches a motor. When a limit switch is set to true, it stops the motor.
vTaskResume(xHandle_LED_x) as motor will move, Leds have to blink.
stepper1.homing() send motor to its ‘homing’ position at speed of 20 step/sec.
stepper1.wait() wait motor to reach its position (blocking function)
stepper1.detachLimitSwitch(MOTOR_1, DIN_1); stepper1.detachLimitSwitch(MOTOR_2, DIN_3); // play an animation // remind : stepper motor = 200 steps/revolution Serial.println(F("Starting animation.")); stepper1.setMaxSpeed(MOTOR_1, 100); stepper1.setMaxSpeed(MOTOR_2, 100); stepper1.moveAbsolute(MOTOR_1, 250); stepper1.moveAbsolute(MOTOR_2, 250); stepper1.wait(MOTOR_1); stepper1.wait(MOTOR_2); Serial.println(F("MOTOR_1 position :")); Serial.println(stepper1.getPosition(MOTOR_1)); Serial.println(F("MOTOR_2 position :")); Serial.println(stepper1.getPosition(MOTOR_2)); delay(1000);
stepper1.detachLimitSwitch() Disable limit switches , preparing to move more than one revolution. stepper1.setMaxSpeed() Set motor speed rotation stepper1.moveAbsolute() Set absolution position to reach (unit : step)
stepper1.wait() wait motor to reach its position (blocking function)
Display some debug info with stepper1.getPosition() which is the actual position of moto, to confirm that each motor have reach the order.
wait 1 second before doing an other movement.
stepper1.setMaxSpeed(MOTOR_1, 800); stepper1.setMaxSpeed(MOTOR_2, 800); stepper1.moveRelative(MOTOR_1, 300); stepper1.moveRelative(MOTOR_2, -100); stepper1.wait(MOTOR_1); stepper1.wait(MOTOR_2); Serial.println(F("MOTOR_1 position :")); Serial.println(stepper1.getPosition(MOTOR_1)); Serial.println(F("MOTOR_2 position :")); Serial.println(stepper1.getPosition(MOTOR_2)); delay(1000);
Same sequence as above but with a relative commande. stepper1.moveRelative() set a relative movement to do (unit : step).
stepper1.setAcceleration(MOTOR_1, 2000); stepper1.setMaxSpeed(MOTOR_1, 10000); stepper1.setMaxSpeed(MOTOR_2, 4000); stepper1.moveAbsolute(MOTOR_1, 0); stepper1.moveAbsolute(MOTOR_2, 0); stepper1.wait(MOTOR_1); stepper1.wait(MOTOR_2); Serial.println(F("MOTOR_1 position :")); Serial.println(stepper1.getPosition(MOTOR_1)); Serial.println(F("MOTOR_2 position :")); Serial.println(stepper1.getPosition(MOTOR_2));
Same sequence as above but with a higher speed and more steps to run.
// Free motors shafts stepper1.stop(MOTOR_1, HARD_HIZ); stepper1.stop(MOTOR_2, HARD_HIZ); // stop playing... Serial.println(F("Animation ended."));
stepper1.stop(MOTOR_1, HARD_HIZ) Stops motors with HARD_HIZ argument, meaning that motor shaft are free (position is not keept).
// stops leds blinking vTaskSuspend(xHandle_LED_1); vTaskSuspend(xHandle_LED_2); // force LEDs off core.digitalWrite(DOUT_3, LOW); core.digitalWrite(DOUT_4, LOW);
Stop Leds blinking by suspending their tasks and force them to 0.
Serial.println(F("Setting button and limit switches ...")); // Allow user switch to drive motors core.attachInterrupt(DIN_1, switch_mode, CHANGE_MODE, NULL); core.attachInterrupt(DIN_2, switch_mode, CHANGE_MODE, NULL); // attach sensors as limit switches stepper1.attachLimitSwitch(MOTOR_1, DIN_1, ACTIVE_HIGH); stepper1.attachLimitSwitch(MOTOR_1, DIN_2, ACTIVE_HIGH); stepper1.attachLimitSwitch(MOTOR_2, DIN_3, ACTIVE_HIGH); stepper1.attachLimitSwitch(MOTOR_2, DIN_4, ACTIVE_HIGH); Serial.println(F("--------------------------------------")); Serial.println(F("You can now use switch to move motors."));
Demo sequence is terminated. user is now allowed to play with the central switch to control motors manually. To allow this :
- core.attachInterrupt(DIN_1, switch_mode, CHANGE_MODE, NULL)
This function create an interrupt call to switch_mode() function when OI-Core[DIN_1] changes state.
- core.attachInterrupt(DIN_2, switch_mode, CHANGE_MODE, NULL)
This function create an interrupt call to switch_mode() function when OI-Core[DIN_1] changes state.
- All limit switches are enable
When a sensor will detect the motor arm, it will stops the motor.
Loop() function
if (switchevent == true)
Main loop is waiting for a switchevent. This variable is update in switchmode() interrupt function when the bouton is changing state.
// reset event generated by switch interrupt switchevent = false;
switchevent is reseted to allow next event to re-enter in this condition.
//Switch on pushed on "left" side if (core.digitalRead(DIN_1) == 1 && core.digitalRead(DIN_2) == 0) { mode = 1; stepper1.run(MOTOR_1, motor1_dir, 100); stepper1.stop(MOTOR_2); vTaskResume(xHandle_LED_1); core.digitalWrite(DOUT_4, LOW); Serial.println(F("MOTOR_1 position :")); Serial.println(stepper1.getPosition(MOTOR_1)); Serial.println(F("MOTOR_2 position :")); Serial.println(stepper1.getPosition(MOTOR_2)); // reverse direction of the other motor, for fun motor2_dir = reverse_motdir(motor2_dir); }
Reading OI-Core[DIN_1] and OI-Core[DIN_2] inputs to determine on which side the button is pushed. If button is pushed on left side, MOTOR1 will move 100 steps in motor1_dir direction.
LED LED of the other motor is forced to low with core.digitalWrite(DOUT_4, LOW);
For fun, MOTOR2 direction is reversed with reverse_motdir() function.
//Switch on pushed on "left" side else if ((core.digitalRead(DIN_1) == 0 && core.digitalRead(DIN_2) == 1)) { mode = 2; stepper1.stop(MOTOR_1); stepper1.run(MOTOR_2, motor2_dir, 100); vTaskResume(xHandle_LED_2); core.digitalWrite(DOUT_3, LOW); Serial.println(F("MOTOR_1 position :")); Serial.println(stepper1.getPosition(MOTOR_1)); Serial.println(F("MOTOR_2 position :")); Serial.println(stepper1.getPosition(MOTOR_2)); // reverse direction of the other motor, for fun motor1_dir = reverse_motdir(motor1_dir); }
Reading OI-Core[DIN_1] and OI-Core[DIN_2] inputs to determine on which side the button is pushed. If button is pushed on right side, MOTOR2 will move 100 steps in motor2_dir direction.
LED of the other motor is forced to low with core.digitalWrite(DOUT_3, LOW);
For fun, MOTOR1 direction is reversed with reverse_motdir() function.
//Switch on the middle position (do nothing) else { mode = 0; // force motors to stop stepper1.stop(MOTOR_1, SOFT_STOP); stepper1.stop(MOTOR_2, SOFT_HIZ); // stop task that blink leds vTaskSuspend(xHandle_LED_1); vTaskSuspend(xHandle_LED_2); // force LEDs off core.digitalWrite(DOUT_3, LOW); core.digitalWrite(DOUT_4, LOW); } Serial.print("mode : "); Serial.println(mode);
When button is in the ‘middle’ position, Leds are stopped (vTaskSuspend) and force to low. MOTOR_1 is stopped with SOFT_STOP , that means that its position is held by software, it should be not possible to move it manually. MOTOR_2 is stopped with SOFT_HIZ , that means that its position is not held, it should be possible to move it manually.
Others functions called in Setup() and Loop() functions
switch_mode()
void switch_mode(void*) { // set switch event flag to true (minimize software interrupt) switchevent = true; Serial.println(F("Switch mode interrupt detected.")); }
This interrupt function must be as small as possible. switchevent is set to true. This event will be managed in the Loop() function.
blink_LED_1()
void blink_LED_1(void *) { while (1) { core.digitalWrite(DOUT_3, HIGH); delay(50); core.digitalWrite(DOUT_3, LOW); delay(50); core.digitalWrite(DOUT_3, HIGH); delay(50); core.digitalWrite(DOUT_3, LOW); delay(250); } }
This function is a task that is suspended or resumed in the Loop() function. It is an infinite loop that switch on and off an output (LED1)
blink_LED_2()
void blink_LED_2(void *) { while (1) { core.digitalWrite(DOUT_4, HIGH); delay(50); core.digitalWrite(DOUT_4, LOW); delay(50); core.digitalWrite(DOUT_4, HIGH); delay(50); core.digitalWrite(DOUT_4, LOW); delay(250); } }
This function is a task that is suspended or resumed in the Loop() function. It is an infinite loop that switch on and off an output (LED2)
Source code (full)
#include "OpenIndus.h"
#include "Arduino.h"
// First, init the master device
OICore core;
// Then add slaves devices here :
OIStepper stepper1;
int mode = 0;
bool switchevent = false;
TaskHandle_t xHandle_LED_1 = NULL;
TaskHandle_t xHandle_LED_2 = NULL;
MotorDirection_t motor1_dir = FORWARD;
MotorDirection_t motor2_dir = FORWARD;
MotorDirection_t reverse_motdir(MotorDirection_t dir)
{
// return opposite motor direction
if (dir == FORWARD)
{
return REVERSE;
}
else
{
return FORWARD;
}
}
void switch_mode(void*)
{
// set switch event flag to true (minimize software interrupt)
switchevent = true;
Serial.println(F("Switch mode interrupt detected."));
}
void blink_LED_1 (void *)
{
while (1)
{
core.digitalWrite(DOUT_3, HIGH);
delay(50);
core.digitalWrite(DOUT_3, LOW);
delay(50);
core.digitalWrite(DOUT_3, HIGH);
delay(50);
core.digitalWrite(DOUT_3, LOW);
delay(250);
}
}
void blink_LED_2 (void *)
{
while (1)
{
core.digitalWrite(DOUT_4, HIGH);
delay(50);
core.digitalWrite(DOUT_4, LOW);
delay(50);
core.digitalWrite(DOUT_4, HIGH);
delay(50);
core.digitalWrite(DOUT_4, LOW);
delay(250);
}
}
void setup()
{
Serial.begin(115200);
Serial.println(F("Initializing..."));
xTaskCreate(blink_LED_1, "blink_LED_1", 2048, NULL, 1, &xHandle_LED_1);
vTaskSuspend(xHandle_LED_1);
xTaskCreate(blink_LED_2, "blink_LED_2", 2048, NULL, 2, &xHandle_LED_2);
vTaskSuspend(xHandle_LED_2);
switch_mode(NULL);
// Reset Stepper limitswitch
stepper1.detachLimitSwitch(MOTOR_1, DIN_1);
stepper1.detachLimitSwitch(MOTOR_1, DIN_2);
stepper1.detachLimitSwitch(MOTOR_2, DIN_3);
stepper1.detachLimitSwitch(MOTOR_2, DIN_4);
// move motors to their initial position.
// Set right sensors as limit switches for each motor
Serial.println(F("Homing motors."));
stepper1.attachLimitSwitch(MOTOR_1, DIN_1, ACTIVE_HIGH);
stepper1.attachLimitSwitch(MOTOR_2, DIN_3, ACTIVE_HIGH);
// blink leds while motor are moving
vTaskResume(xHandle_LED_1);
vTaskResume(xHandle_LED_2);
stepper1.homing(MOTOR_1, 20);
stepper1.homing(MOTOR_2, 20);
// wait for homing
stepper1.wait(MOTOR_1);
stepper1.wait(MOTOR_2);
Serial.println(F("Motors at their 0 position."));
delay(1000);
stepper1.detachLimitSwitch(MOTOR_1, DIN_1);
stepper1.detachLimitSwitch(MOTOR_2, DIN_3);
// play an animation
// remind : stepper motor = 200 steps/revolution
Serial.println(F("Starting animation."));
stepper1.setMaxSpeed(MOTOR_1, 100);
stepper1.setMaxSpeed(MOTOR_2, 100);
stepper1.moveAbsolute(MOTOR_1, 250);
stepper1.moveAbsolute(MOTOR_2, 250);
stepper1.wait(MOTOR_1);
stepper1.wait(MOTOR_2);
Serial.println(F("MOTOR_1 position :"));
Serial.println(stepper1.getPosition(MOTOR_1));
Serial.println(F("MOTOR_2 position :"));
Serial.println(stepper1.getPosition(MOTOR_2));
delay(1000);
stepper1.setMaxSpeed(MOTOR_1, 800);
stepper1.setMaxSpeed(MOTOR_2, 800);
stepper1.moveRelative(MOTOR_1, 300);
stepper1.moveRelative(MOTOR_2, -100);
stepper1.wait(MOTOR_1);
stepper1.wait(MOTOR_2);
Serial.println(F("MOTOR_1 position :"));
Serial.println(stepper1.getPosition(MOTOR_1));
Serial.println(F("MOTOR_2 position :"));
Serial.println(stepper1.getPosition(MOTOR_2));
delay(1000);
stepper1.setAcceleration(MOTOR_1, 2000);
stepper1.setMaxSpeed(MOTOR_1, 10000);
stepper1.setMaxSpeed(MOTOR_2, 4000);
stepper1.moveAbsolute(MOTOR_1, 0);
stepper1.moveAbsolute(MOTOR_2, 0);
stepper1.wait(MOTOR_1);
stepper1.wait(MOTOR_2);
Serial.println(F("MOTOR_1 position :"));
Serial.println(stepper1.getPosition(MOTOR_1));
Serial.println(F("MOTOR_2 position :"));
Serial.println(stepper1.getPosition(MOTOR_2));
// Free motors shafts
stepper1.stop(MOTOR_1, HARD_HIZ);
stepper1.stop(MOTOR_2, HARD_HIZ);
// stop playing...
Serial.println(F("Animation ended."));
// stops leds blinking
vTaskSuspend(xHandle_LED_1);
vTaskSuspend(xHandle_LED_2);
// force LEDs off
core.digitalWrite(DOUT_3, LOW);
core.digitalWrite(DOUT_4, LOW);
Serial.println(F("Setting button and limit switches ..."));
// Allow user switch to drive motors
core.attachInterrupt(DIN_1, switch_mode, CHANGE_MODE, NULL);
core.attachInterrupt(DIN_2, switch_mode, CHANGE_MODE, NULL);
// attach sensors as limit switches
stepper1.attachLimitSwitch(MOTOR_1, DIN_1, ACTIVE_HIGH);
stepper1.attachLimitSwitch(MOTOR_1, DIN_2, ACTIVE_HIGH);
stepper1.attachLimitSwitch(MOTOR_2, DIN_3, ACTIVE_HIGH);
stepper1.attachLimitSwitch(MOTOR_2, DIN_4, ACTIVE_HIGH);
Serial.println(F("--------------------------------------"));
Serial.println(F("You can now use switch to move motors."));
}
void loop()
{
if (switchevent == true)
{
// reset event generated by switch interrupt
switchevent = false;
//Switch on pushed on "left" side
if (core.digitalRead(DIN_1) == 1 && core.digitalRead(DIN_2) == 0)
{
mode = 1;
stepper1.run(MOTOR_1, motor1_dir, 100);
stepper1.stop(MOTOR_2);
vTaskResume(xHandle_LED_1);
core.digitalWrite(DOUT_4, LOW);
Serial.println(F("MOTOR_1 position :"));
Serial.println(stepper1.getPosition(MOTOR_1));
Serial.println(F("MOTOR_2 position :"));
Serial.println(stepper1.getPosition(MOTOR_2));
// reverse direction of the other motor, for fun
motor2_dir = reverse_motdir(motor2_dir);
}
//Switch on pushed on "left" side
else if ((core.digitalRead(DIN_1) == 0 && core.digitalRead(DIN_2) == 1))
{
mode = 2;
stepper1.stop(MOTOR_1);
stepper1.run(MOTOR_2, motor2_dir, 100);
vTaskResume(xHandle_LED_2);
core.digitalWrite(DOUT_3, LOW);
Serial.println(F("MOTOR_1 position :"));
Serial.println(stepper1.getPosition(MOTOR_1));
Serial.println(F("MOTOR_2 position :"));
Serial.println(stepper1.getPosition(MOTOR_2));
// reverse direction of the other motor, for fun
motor1_dir = reverse_motdir(motor1_dir);
}
//Switch on the middle position (do nothing)
else
{
mode = 0;
// force motors to stop
stepper1.stop(MOTOR_1, SOFT_STOP);
stepper1.stop(MOTOR_2, SOFT_HIZ);
// stop task that blink leds
vTaskSuspend(xHandle_LED_1);
vTaskSuspend(xHandle_LED_2);
// force LEDs off
core.digitalWrite(DOUT_3, LOW);
core.digitalWrite(DOUT_4, LOW);
}
Serial.print("mode : ");
Serial.println(mode);
}
delay(100);
}